반응형
3-2 로봇 제어 기술 및 로봇 제어 패러다임
로봇 제어 기술의 소개
- 기구학: 로봇의 관절, 바퀴의 회전, 로봇의 움직임을 결정하는 데 사용하는 이론
- 동역학: 로봇의 움직이는 힘과 운동, 속도를 해석하는 분야
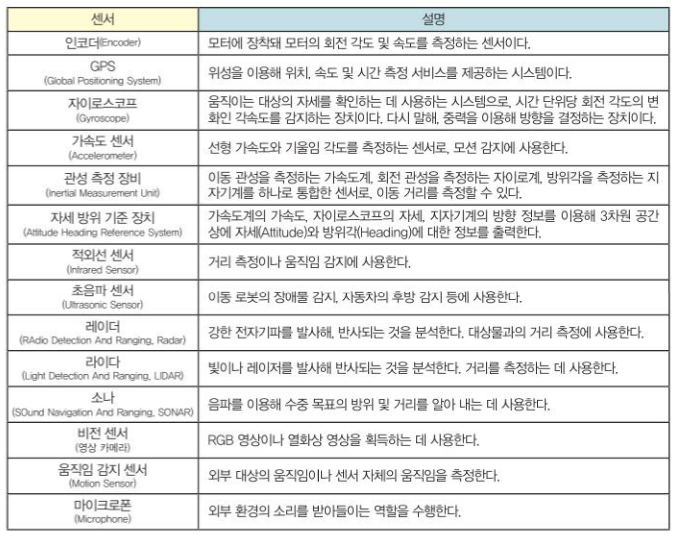
- 센서: 장비의 내부, 외부 조건 및 상황을 계측하기 위해 사용하는 장치
- 구동기: 로봇의 관절이나 바퀴 등에 제어 신호에 따라 반응하는 움직임을 주는 장치
- 제어: 생성된 퀘적을 따라갈 때 기계적 정밀도, 오작동, 미끄러짐과 같은 환경 요인의 영향으로 동작이 다를 수 있는데 이 차이를 보정해 목표한 대로 만드는 것
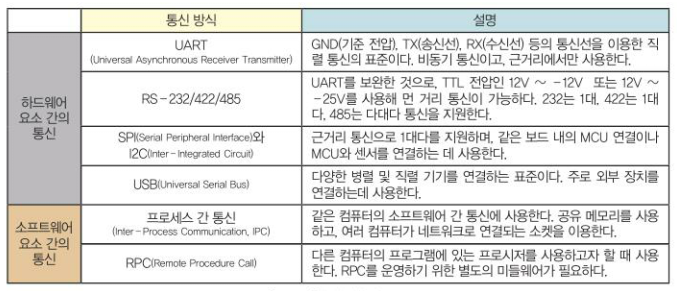
- 통신: 로봇 구성 요소의 상호 작용을 위해 데이터와 신호를 주고받는 동작
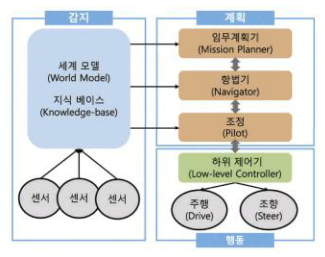
로봇 제어 패러다임
- 계층형 패러다임: 감지, 계획, 행동의 과정을 반복하도록 구성한 것
- 반응형 패러다임: 계획 수립 단계 없이 센서를 통해 감지된 상황별로 어떤 행동을 할 것인지 실시간으로 대응하는 것
- 혼합형 패러다임: 센서 데이터가 행위 모듈뿐만 아니라 계획 모듈에도 전달돼, 행위를 하면서 대상 모델을 최신 상태로 갱신하도록 하는 것
로봇 제어 패러다임의 예
※ 해당 내용은 <인공지능 바이블>의 내용을 토대로 학습하며 정리한 내용입니다.
반응형
'인공지능(AI)' 카테고리의 다른 글
| 인공지능 관련 도구의 소개 (1) (0) | 2023.06.13 |
|---|---|
| 지능 로봇 (3) (0) | 2023.06.12 |
| 지능 로봇 (1) (0) | 2023.06.10 |
| 자연어 처리 (5) (0) | 2023.06.09 |
| 자연어 처리 (4) (0) | 2023.06.08 |


